Remote Controlled Robot
Challenge
I took a robotics design course (MREN 303) out of personal interest last year where I competed in a head-to-head game against other students to score the most points. The competition consisted of navigating autonomously through a gate, followed by a human operated section to pick up and dispose of as many objects as possible.
Approach
To start, we looked at each aspect of the competition and translated these into functional requirements. Then, we researched the best ways to achieve the functional requirements until we came up with each component. In parallel with the design, I made programs in Arduino and Python so all of the components could work together. Finally, we thoroughly tested all of the functions before the competition so that we were confident going in. Despite having almost no experience with robotics before this competition, my teammate and I placed 4th out of about 25 teams.
Contribution
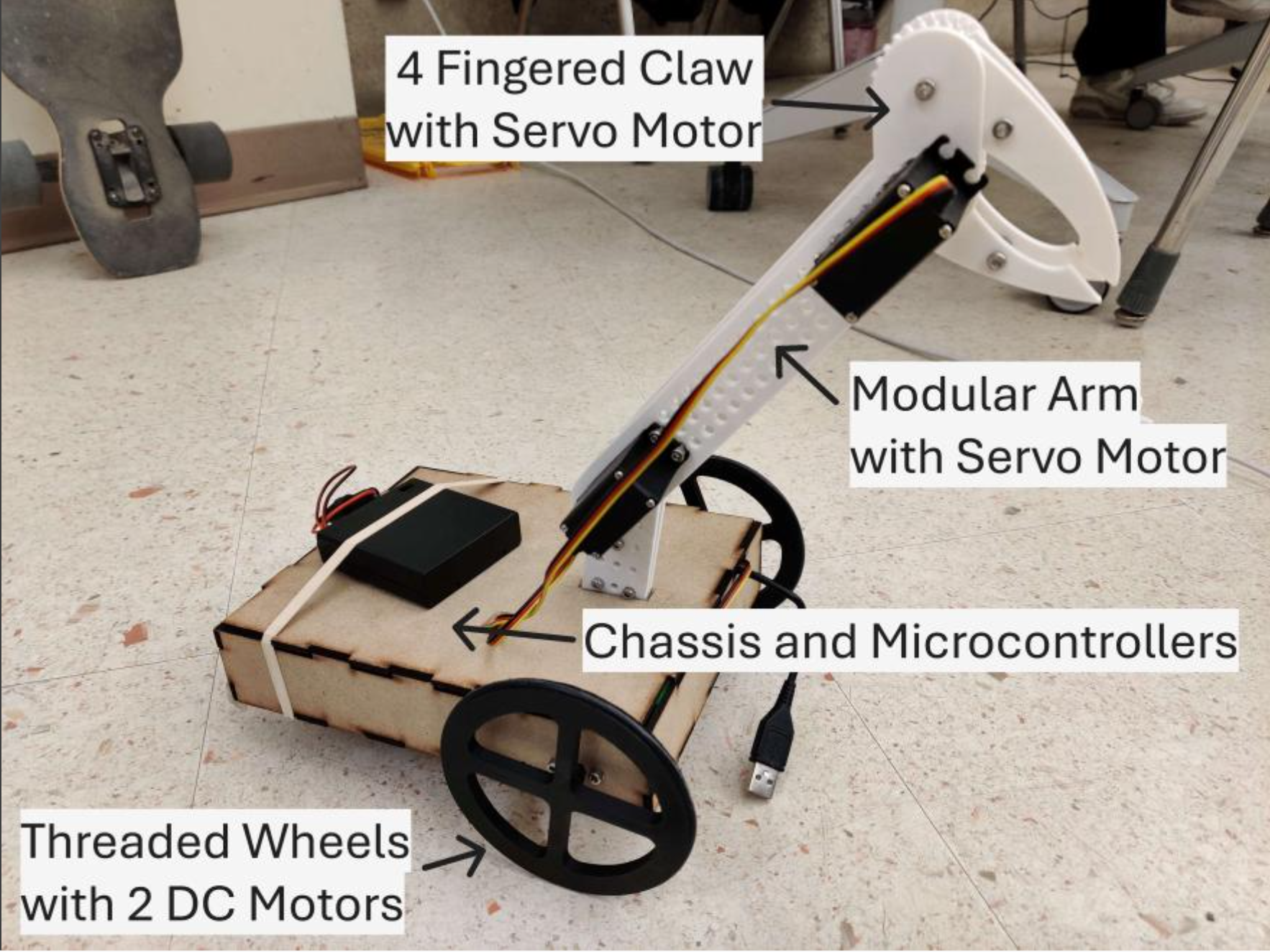
- Designed and fabricated the arm, claw, chassis, and back roller
- Read and mapped controls from logitech remote in python, interpreted and executed them in C++
- Designed and implemented a PID controller to control the velocity and position of the robot
- Programmed and tested the autonomous mode using encoders on the motors